Nexi
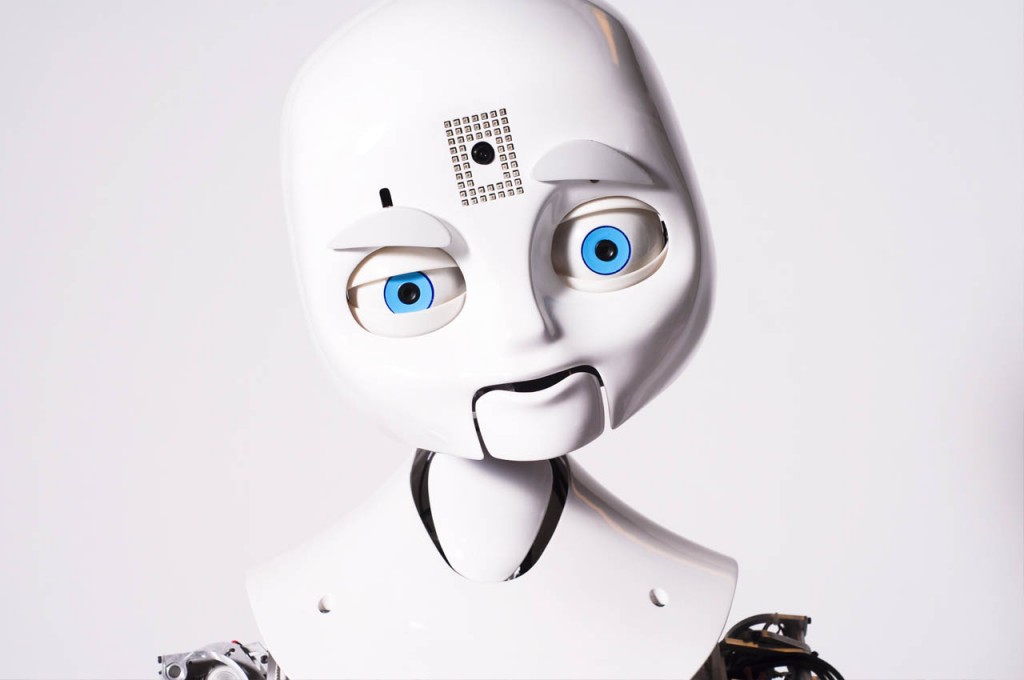
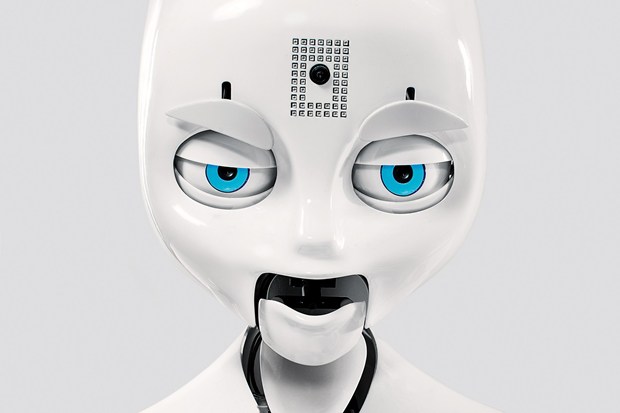
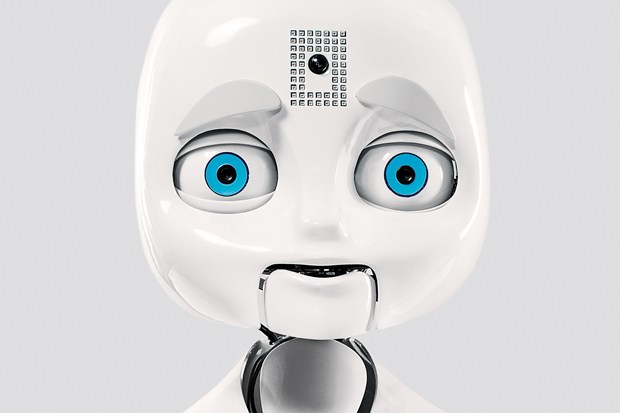
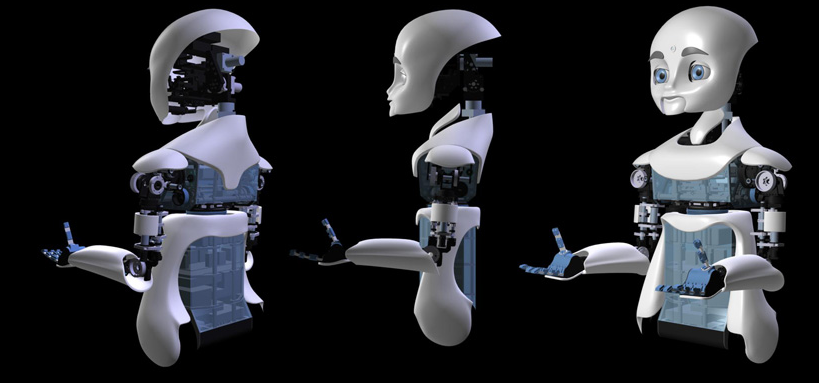
Nexi has the legs of R2D2, the face of C-3PO and the emotional I.Q. of HAL 9000. Nexi represents the current generation of MDS robotics. MDS stands for Mobile, Dexterous and Social. The Mobile refers to a two-wheel base, the Dexterous refers to arms that can pick up, grip and throw objects, and the Social refers to the head’s ability to understand and express emotions. Nexi expresses emotions the same way you do – with your highly mobile face. Her face has been designed to use gaze, eyebrows, eyelids and an articulate mandible to communicate a greater range of different emotions. When she’s excited, for example, Nexi will raise her eyebrows and open her eyelids and mouth. She can be sad, mad, bored, frightened.
Nexi is MIT’s new mobile robot designed for studies in human-robot interaction and more. The team responsible for this social robot is the Personal Robot Group from MIT’s media lab. They developed 4 small mobile humanoid robots that possess a novel combination of mobility, moderate dexterity, and human-centric communication and interaction abilities. The MIT team collects data from interactions with human subjects and processes this information through a cognitive-affective software that enables the robot to learn from her environment. Nexi extracts lessons, which are added to a knowledge-corpus that informs how she reacts.
A lot of interaction-reaction data has been collected through collaboration with the Boston Museum of Science, where Nexi regularly meets with large groups of toddlers in controlled environments.
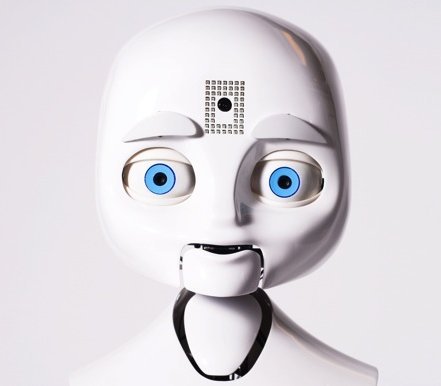
Nexi is built over the uBot mobile platform and has two hands allowing for dexterous manipulation; an expressive face with multiple cameras completes the robot. She has enough on-board circuitry to handle low level control tasks. Wireless networking allows the researchers to use remote workstations for high-level control (including cognition,) and audio/visual data processing.
The purpose of this platform is to support research and education goals in human-robot interaction, teaming, and social learning. In particular, the small footprint of the robot (roughly the size of a 3 year old child) allows multiple robots to operate safely within a typical laboratory floor space. MIT is responsible for the overall design, the mobile manipulator is developed by UMASS Amherst, and system integration is handled by Xitome Design.
You might also like

Meet The Saudi Arabian Robotic Citizen
In October 2017 Saudi Arabia granted citizenship to a robot, the first time this has happened anywhere in the world. Saudi was not the only ones impressed with Sophia. In
Meet The Man Who Uses Robotics To Make Music!
Meet Moritz Simon Geist, the man who uses robotics to make music. He is an upcoming DJ of sorts who is making huge waves at the moment with his innovative

Another Step Forward For SpotMini
Boston Dynamics has progressed even further with SpotMini, now it will open doors to lets its friends through. The company is well known for producing robots that can walk, run,
{kind=link}