FLASH
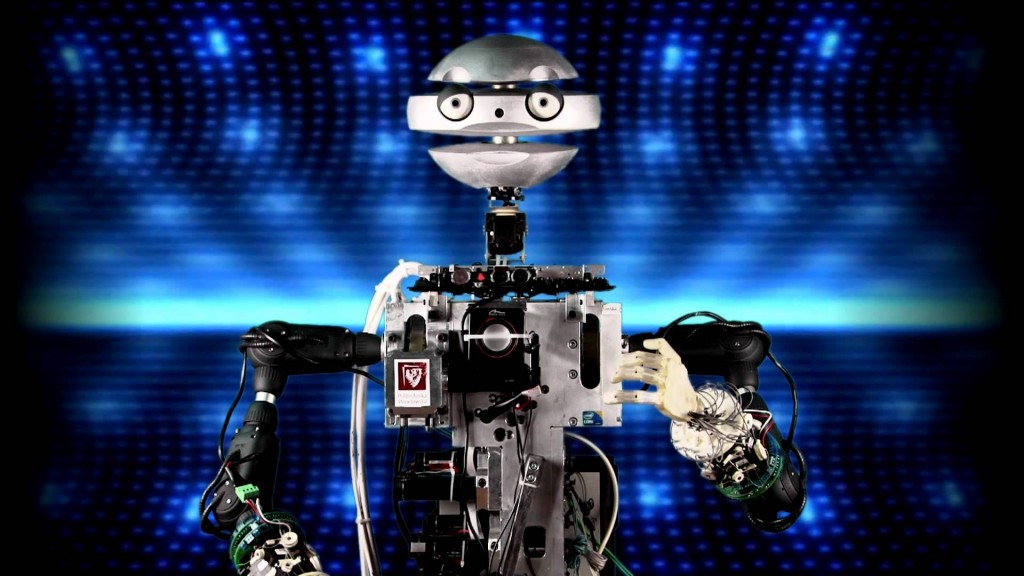
FLASH stands for Flexible LIREC Autonomous Social Helper. He was designed and built at the Wroclaw University of Technology (WRUT) in cooperation with Produkt Dizajn Studio, TF Construction, and Cad-Mech. Flash was made as a contribution to Living with Robots and Interactive Companions – LIREC. The project has received funding from the European Community’s Seventh Framework Programme.
The role of FLASH in the project has been two-fold: first, FLASH serves as an integration platform of diverse technologies developed in LIREC, second, FLASH enables experimental verification of these technologies in social environments (HRI experiments).
It is well known that in the initiation and sustainment of human/human interaction the emotions are of primary significance. It has been assumed that the emotions are a means of non-verbal human/robot and robot/human communication. With that in mind, in order for a robot to be able to efficiently communicate and interact with humans it needs to be endowed with sensors, effectors and control systems allowing him to perceive, process, and demonstrate emotions.
All components (mobile platform, the hands, and the head) are attached to the robot torso covering the FLASH main chassis frame. The robot mobile platform includes the motion and balancing controllers, the navigation module, and the robot power supply system. The platform base also supports the robot chassis, and the hands and head is fixed to the top part of this. FLASH is mounted on a balancing mobile platform with a natural compliance which makes this design acceptable to people (especially children) and safe. The FLASH hands are intended primarily to perform simple gesticulation tasks, but they may also be able to execute basic grasping. The main design objective has been to obtain a smoothly and reliably operating device, positively perceived by humans. The head has fundamental significance in robot-human communication. The FLASH head EMYS, has implement competences for generating facial expressions, gaze/head movement, and expressive behaviour. The head can express basic facial expressions, including happiness, sadness, surprise, anger, weariness, and disgust. The head is mounted on a movable neck for purposes of objects searching, turning toward a user, and gazing.

~ Marta
You might also like
Robots Undertake More Tasks Than You May Realize
Most people are aware that robots are being used for some of the mundane tasks in factories and warehouses and apart from the concern about human job losses, are happy

Atlas The Robot Is Becoming Even More Human
Atlas, developed by Boston Dynamics with funding from the United States Defense Advanced Research Project (DARPA), is a 1.8 meter (6 foot) humanoid. It is intended that Atlas will eventually
Robots To Help With Your Job
The UNSW Creative Robotics Lab and Fuji Xerox Research Technology Group have said they are not interested in making robots to replace humans. For the last three years they have
{kind=link}