Harvard’s New Cockroach Inspired Robot
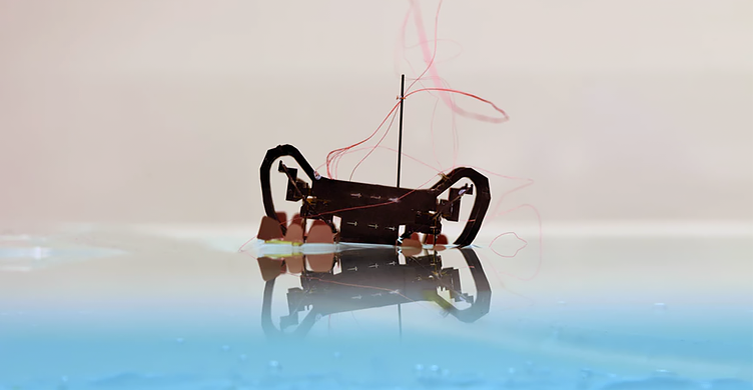
Previously the Harvard robotics team has managed to conjure up an innovative and exciting bot inspired by a cockroach. It was at the time capable of scuttling around in the fashion of a bug such as a cockroach would. However, since then they have built even further on the already incredible invention, how? It can now walk on water, similar again to a cockroach. It has been given the ability to walk on top of and underwater with relative ease. Real cockroaches are able to survive underwater to upwards of 30 minutes comfortably. It is not known whether the HAMR even has a limit on how long it can survive below the surface, but don’t be surprised if it is capable of staying under for an unlimited amount. Obviously, these new improvements also open up a staggering array of other potential improvements to be looked at the future.
What is the Harvard’s New Cockroach Inspired Robot All About?
Kevin Chen, postdoctoral at the Harvard University’s John A. Paulson School of Engineering stated “There are two parts for achieving walking on water” in an interview with Digital Trends. He continued “First is supporting the robots weight via surface tension, and second is moving on the water surface via asymmetric paddling”. In order to support the weight of the robot on the waters surface the robot uses a force called surface tension. This means when the device is on the surface it actually sinks slightly. This causes a minor deformation in the water, which generated enough upward force to support the weight of the robot. Have you ever seen a beetle stuck in water doing its strange swimming motion? Turns out that technique is actually perfect for the HAMR, it indeed utilizes this form of swimming to effectively get around water quickly. It flaps retractable paddle-like arms backward and forwards to push itself in whatever direction it needs to travel in.
On the topic of possible uses, Chen said, “I would go for search-and-rescue and exploration” he carried on saying “Think about a scenario in which a building collapsed due to earthquake or tsunami. There are many people trapped in confined and cluttered environments. We can send in a swarm (hundreds) of these small robots into the site to search for survivors. These robots should be able to overcome obstacles on land. In addition, when facing water puddles, the robots need to bypass these by walking on the water surface or dive down to avoid obstacles on the water surface”.
Looking forward, the team has confirmed that they will be looking to implement batteries and sensors onto the device while also further increasing the total payload of the bot without it becoming too hefty and immobile to carry out its purpose. They are also interested in adding more impressive functionalities such as jumping and climbing. Obviously, these are not easy tasks, especially on such a small bot. Chen states the future of the robot will be seen in around 5 to 10 years.
You might also like

AI Brain Patterns
Researchers from places such as Korea Advanced Institute of Science and Technology, the University of Cambridge, and many other institutes are currently stating that our general and practical understanding of
Self-Healing Robot Hands
A new development from the world of robotics is very peculiar. Scientists have now developed a sort of self-healing robot hands like device. This strange-looking device can carry out simple

HOAP
The HOAP series robots are an advanced humanoid robot platform manufactured by Fujitsu Automation in Japan. HOAP is an abbreviation for “Humanoid for Open Architecture Platform”. In 2001, Fujitsu realized
{kind=link}