
RHex
RHex is a six-legged robot with inherently high mobility. RHex is a creation of researchers at the University of Pennsylvania who hope it could one day climb rubble in emergency rescue situations or zoom across scorching desert sands with its six whirling, springy legs.
“What we want is a robot that can go anywhere, even over terrain that might be broken and uneven,” said graduate student Aaron Johnson, one of those researchers. “These latest jumps greatly expand the range of what this machine is capable of, as it can now jump onto or across obstacles that are bigger than it is.”

– The use of legs instead of wheels or tracks opens the way for a large number of behaviors,
– Passive compliance in the legs overcomes limitations of underactuation and helps simplify mechanical design, yielding robustness,
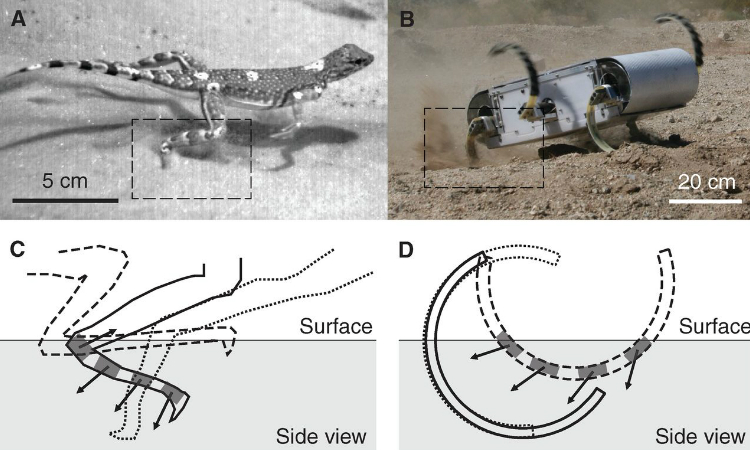
– Sprawled posture, inspired from insects, results in passive stabilization of lateral motion,
– Control is open-loop at the gait level, but closed loop at the task level. Stability comes as a result of passive mechanics, not high-bandwidth active control,
On robots, legs are more effective than wheels when it comes to rough terrain. But it can be complicated to teach the human-like legs on walking robots how to respond to unpredictable conditions.
In the video showing off an impressive vertical leap, doing several back flips and propelling itself up steps.
~Olga
You might also like

The Latest Offerings From Festo
Festo are known for their robotic animals having previously developed a robotic dragonfly, kangaroo and penguin. This German electrical automation company have now unveiled their latest offerings, a robotic rolling

The Updated Handle From Boston Dynamics
Back in 2017, Boston Dynamics unveiled the first version of Handle. Although it had legs with what looked like knees bent backward, it also had wheels for its feet. The

Robots are learning etiquette
Should robots be familiar with etiquette, which basically was designed by humans for humans? If they want to live amongst us, they should!
{kind=link}