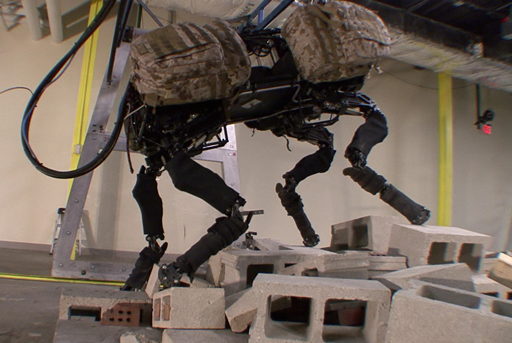
BigDog
BigDog is a rough-terrain robot that walks, runs, climbs and carries heavy loads. BigDog is powered by an engine that drives a hydraulic actuation system. BigDog has four legs that are articulated like an animal’s, with compliant elements to absorb shock and recycle energy from one step to the next. BigDog is the size of a large dog or small mule; about 3 feet long, 2.5 feet tall and weighs 240 lbs.
BigDog’s on-board computer controls locomotion, processes sensors and handles communications with the user. BigDog’s control system keeps it balanced, manages locomotion on a wide variety of terrains and does navigation. Sensors for locomotion include joint position, joint force, ground contact, ground load, a gyroscope, LIDAR and a stereo vision system. Other sensors focus on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery charge and others.

BigDog runs at 4 mph, climbs slopes up to 35 degrees, walks across rubble, climbs muddy hiking trails, walks in snow and water, and carries 340 lb load.
Development of the original BigDog robot was funded by DARPA. Work to add a manipulator and do dynamic manipulation was funded by the Army Research Laboratory’s RCTA program.
source: www.bostondynamics.com
You might also like

The Latest Offerings From Festo
Festo are known for their robotic animals having previously developed a robotic dragonfly, kangaroo and penguin. This German electrical automation company have now unveiled their latest offerings, a robotic rolling
Boston Dynamics Atlas Becoming a Ninja!
Three years ago, Boston Dynamics released its first showcasing of the Atlas robot which absolutely stunned the world. It was the most advanced mobile humanoid robot so far, and this
The Future Of Robotic Assistants Looks Promising, And Cute!
What is Robopin? Robopin is Fujitsu’s latest entry into the vast world of robotics. It has been designed as a friendly looking observer and informer. It has a single eye camera,
{kind=link}